2017年3月7日,交通运输部组织制定了交通运输行业标准《营运客车安全技术条件》(JT/T 1094-2016,以下统称JT/T 1094标准),并于2017年4月1日起正式实施。标准中对9米以上的营运客车要求必须具备车道偏离预警和前方碰撞预警功能(FCW),并给出了13个月的过渡期。这两项功能的详细要求和测试方法,交通运输部在2014年出台的JT/T 883-2014里有详细说明。
在JT/T 883-2014里主要有4个标准引用,首先是GB 5768.3-2009的第三部分,主要定义交通标线就是车道线的标准。其次是GB/T26773-2011,即“智能运输系统 车道偏离报警系统 性能要求与检测方法”,起草单位为交通运输部公路科学研究院和武汉理工大学,由全国智能交通交通运输系统标准化技术委员会SAC/TC 268提出并归口。然后是ISO 15623-2002,中文标准名称为“运输信息和控制系统.前方车辆碰撞警告系统.性能要求和试验程序”,英文标准名称为transport information and control systems -- forward vehiclecollision warning systems -- performance requirements and test procedures,该标准发布于2002年,目前已经被ISO 15623-2013取代。最后一个标准是IEC 60825-1 Ed. 2.0 Cor.1,英文标准名称:Corrigendum1 - Safety of laser products - Part 1: Equipment classification and requirements,因为在2002年的前方碰撞预警主要靠激光雷达(非扫描型),所以加入了激光产品安全标准。
交通部此项强制要求是全球范围内首个强制安装ADAS系统的案例,未来可能进一步延伸到载重车领域。由于AEB的执行器(ESP或ESC)完全被国外厂家垄断,所以AEB不可能强制推广,即便是外资在本国生产ESP或ESC,也不可能强制推广,肥水不流外人田嘛。至于乘用车,考虑到成本接受程度,短期内也不可能推广。
交通部此项强制要求不同于常见的乘用车FCW和LDW。交通部的初衷主要是减少客车重大伤亡事故,LDW实际可以看作驾驶员疲劳监测系统,驾驶员注意力不集中时,通常就会偏离车道,或者说非主动的偏离车道通常意味着驾驶员注意力已经无法集中了。为何不用内置摄像头来监测驾驶员状态,主要是目前技术还未成熟,是以眼部信息为主的系统噪音太大,误报率很高,全球没有量产车使用的先例,而LDW已经很成熟。
与主要在市区行驶的乘用车相比,主要在高速公路上行驶的大型客车的FCW难度要高不少。传统的视觉系统无法适应,有效距离太短。大型客车的FCW系统应该以毫米波系统为主。
先来看有效距离应该是多少。
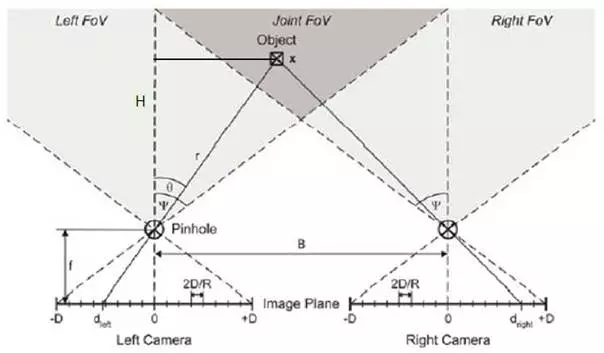
上图是ISO 15623-2013的图三。
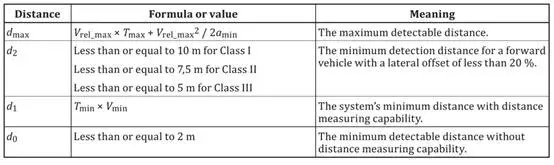
驾驶者最长反应时间(已经包括液压系统建压时间)的典型值为1.5秒,最小减速度典型值为3.6米/秒平方,但这是乘用车或者说客车的典型值,部分大型客车或者重型货车仍然采用气刹方式,反应时间比油刹要长0.5秒左右,典型值为2秒。如果速度为每小时50公里,那么有效距离要达到13.9*1.5+13.9*13.9/7.2=47.65米,客车在高速公路上最高限速为100公里每小时,那么最大有效距离应该为27.8*1.5+27.8*27.8/7.2=148.7米,如果采用2秒的典型值,最大有效距离应该为162.6米。
那么一般摄像头为核心的前方碰撞预警系统的探测距离是多少呢?由摄像头的像素数和光学系统的FOV决定了探测距离。
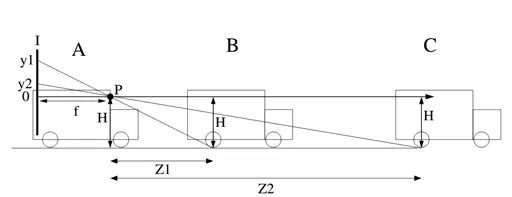

n约等于1,fH远大于nZ,因此公式变为 ,一个像素为30万的CMOS传感器像素分布通常为640*480,配合一个水平47度FOV的镜头,f值大约为740像素,传感器安装高度为1.2米,典型情况下有1个像素的误差,5%的实际距离误差,那么可以计算出此传感器的有效距离大约为
,一个像素为30万的CMOS传感器像素分布通常为640*480,配合一个水平47度FOV的镜头,f值大约为740像素,传感器安装高度为1.2米,典型情况下有1个像素的误差,5%的实际距离误差,那么可以计算出此传感器的有效距离大约为

如果FOV缩小为40度,f为950像素,距离可以增加到57米。但此时会在车身附近产生明显的盲区,Mobileye560的FOV大约为38度,采用安森美的MT9V024CMOS图像传感器,像素尺寸6微米*6微米,阵列格式752*480,像素分布640*480,Mobileye560的说明上明确指出,聚焦范围在5米以外。大部分厂家通常将FOV定为45度或50度。这也是大部分AEB的速度上限为50公里的原因。
同时需要注意距离误差不是一个固定值。通常识别行人需要一个15*15像素的矩形方框,车辆可以放宽到8*8像素。通过像素的方式也可以推算出有效距离,与上面公式推算的距离差不多。提高像素可以增加有效距离。以博世的第二代单目为例,采用1280*960的像素分布,水平50度的FOV,分辨率为每度25像素。对行人的有效检测距离大约为60米,车辆为120米,车道线为60米。
双目有效距离推算和单目差不多。
d为视差像素,b为基线长度,f与单目相同,通常一个FOV为40度的640*480的CMOS图像传感器其f为950像素,视差一般为1像素,基线长度为30厘米的话,有效距离大约为28.5米,不过双目FOV可以缩到很窄,因为它的FOV是合成的。
双目最优秀的是斯巴鲁的Eyesight,2013年10月,斯巴鲁推出第三代Eyesight。

与第二代相比,像素数从30万提升到100万,两个摄像头之间的距离还是350毫米,而第一代是300毫米。每秒30FTP,仍然采用CCD,第四代可能采用CMOS。最远探测距离从第二代的70米提高到120米,水平视角由25度扩展到35度。

奔驰所使用的双目为1280*960像素,水平FOV为53度,基线长为22厘米,深度信息由1024*440像素。有效距离大约60米,最远距离大约80米。宝马与奔驰的相同,双目系统都是由大陆汽车提供,奔驰后改为由LG代工。但基本参数未变。

博世的双目,用于Land Rover DiscoverySportSUV、Jaguar的XFL、XE之上,两个摄像头之间距离为12厘米, 像素数为1080*960,水平视角45度,垂直视角25度,最大探测距离为50米,有效距离大约25-30米。
以上所有公式或推算都是基于白天照度不低于500lux所得,照度低的话,距离也会迅速缩短。
很明显,如果以最严格的标准来要求客车的FCW,视觉系统是不太合适的,有效距离太短了,要知道营运客车大部分时间都在高速公路上飞奔,一般时速都在90公里左右,高的达到120公里。至少单用视觉系统是不行的。那么考虑到成本和技术能力,单用毫米波雷达行吗?答案是行,没问题。不过毫米波雷达没办法对应车道偏离警告,视觉系统还是必不可少。
大部分毫米波雷达对静态目标的识别都很差,除了大陆的ARS 400系列。特别是ARS 410和430,是目前最优秀的毫米波雷达,识别静态目标的能力逼近摄像头系统,可以单用毫米波雷达打造AEB和FCW系统,大众下一代途观就标配 (海外版,大陆版肯定要阉割) ARS 410,据称可以识别骑行者和行人。
不过在高速公路上,车道上绝大部分目标都是动态目标,这非常适合雷达的应用。
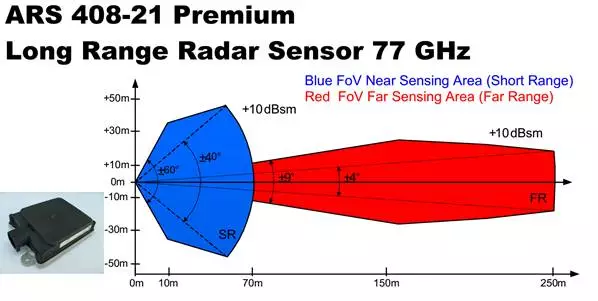
ARS 400系列采用双模扫描,有效距离可以在0.2-250米之间,ARS410最大有效距离为170米,目标分离精确度为6.5±0.2°,ARS 430最大有效距离为250米,目标分离精确度为3±0.1°。
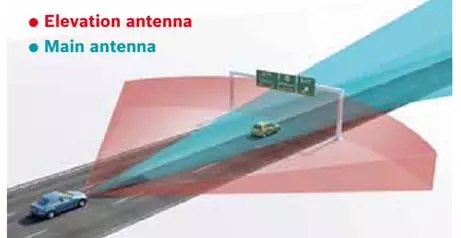
博世长距雷达LRR4相比前代功率更大、结构更紧凑,成本效益更高。全新LLR4雷达传感器中的特点在于对产品雷达波束进行优化。其前一代产品采用4条波束捆绑并产生对前方目标投射,LRR4除了采用原有4束波以外,还另外增加2条雷达波束(高度天线),使得雷达探测广角达40°,比上一代宽了10°,提升了33%。新型LRR4长距雷达可以检测到250米以外的车辆,使得自巡航模式下的汽车时速可达到160km/h。通过6道波束,雷达能更精确测出物体高度,以便更好的避开它们。
德尔福也有30年的雷达经验,ESR系列同样采用大陆汽车的双扫描方式。