奥迪A8是第一款称为L3级自动驾驶的汽车,拥有多个第一,包括第一个使用激光雷达,第一个使用域控制器,第一个使用车载以太网做骨干网的运算架构。即便如此,奥迪A8仍然不能算严格意义上的L3级自动驾驶。毫无疑问,未来L3级自动驾驶的汽车将把域控制器、以太骨干网、Autosar和激光雷达作为标配。而域控制器、以太骨干网、AUTOSAR(特别是新出的自适应AUTOSAR)和激光雷达的核心是以太骨干网,以太骨干网是其他三者存在的基础。
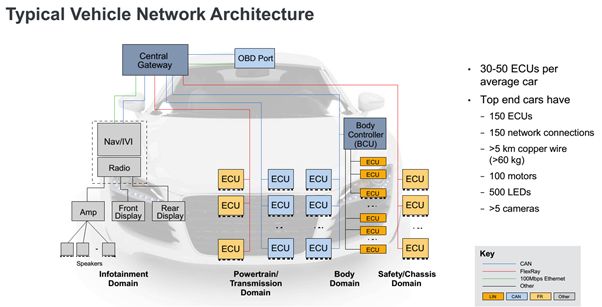
上图为典型的汽车网络架构
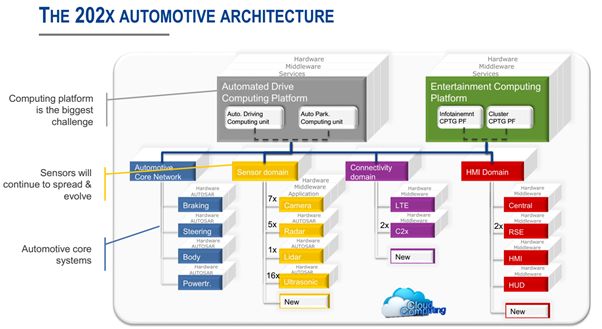
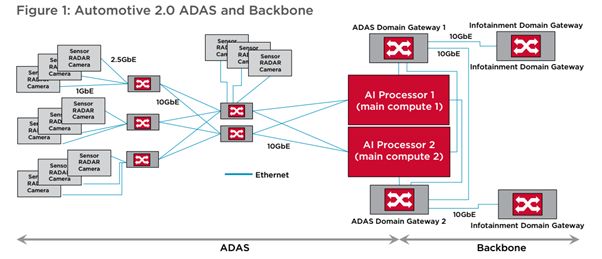
上图是未来汽车网络架构,以太骨干网、域控制器是核心
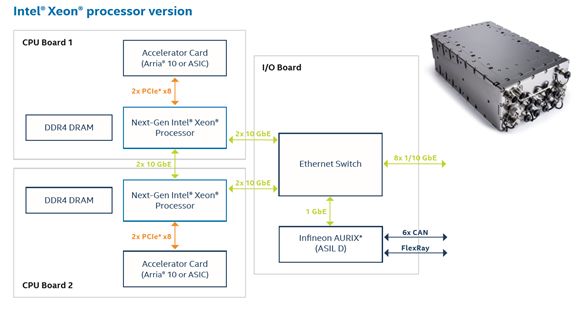
上图是英特尔的无人车运算平台,也是应用了以太骨干网
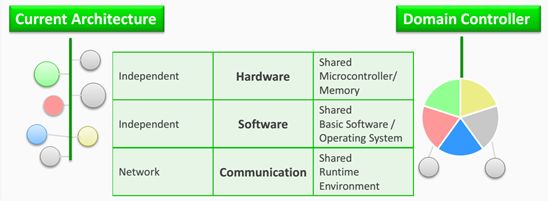
车载以太网最重要的应用就是域控制器。
域控制器加AUTOSAR,不仅可以共享硬件软件通讯资源,还可以大幅度提高软件集成度,提高基础软件的可复用性,厂家只需要关注应用层软件即可。
为什么要在汽车上用以太网
为什么要在汽车上用以太网?除了域控制器,激光雷达,这些需要带宽和全新运算架构,还有一个就是降低成本的需求。传统的汽车总线如下图。
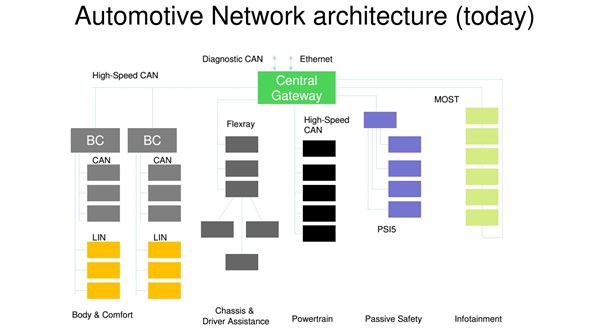
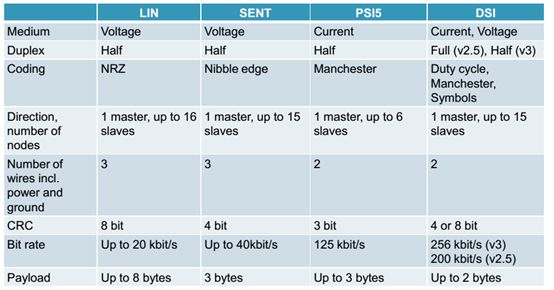
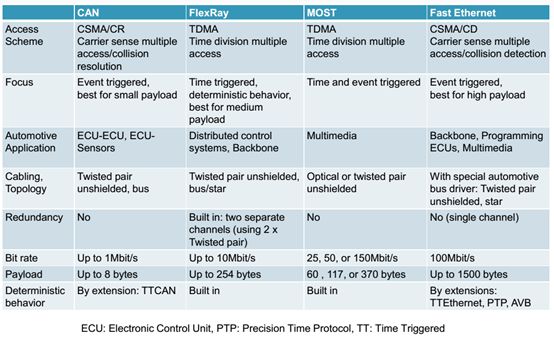
目前车内常见的总线包括LIN(车身领域)、CAN、PSI5(主要是气囊)、CAN-FD(高速CAN)、MOST(大众汽车的信息娱乐系统)、Flexray(德系豪华车的底盘系统与辅助驾驶系统)、FPDLINK(360全景系统)。2010年后汽车电子爆发,ECU数量,ECU的运算能力需求都呈现爆发式增长,在ADAS时代和即将到来的无人驾驶时代讲更加明显,同时对运算带宽的需求也开始爆发。这造成汽车电子系统成本大增,一方面是ECU系统数量和质量的增加,由于是分布式计算,大量的运算资源被浪费了,由此产生的成本增加大约300-500美元,如果沿用目前的电子架构体系,产生的成本增加最少也是1000美元。
另一方面是线束系统。一辆低端车的线束系统成本只要大约300美元,重量大约30公斤,长度大约1500米,线束大约600根,1200个接点。而目前一辆豪华车的线束系统成本大约550-650美元,重量大约60公斤,线束大约1500根,长度大约5000米,3000个接点。如果沿用目前的电子架构体系,无人车时代的线束成本不会低于1000美元,重量可达100公斤。车载以太网使用单对非屏蔽电缆以及更小型紧凑的连接器,使用非屏蔽双绞线时可支持15m的传输距离(对于屏蔽双绞线可支持40m),这种优化处理使车载以太网可满足车载EMC要求。可减少高达80%的车内连接成本和高达30%的车内布线重量。100M车载以太网的PHY采用了1G以太网的技术,可通过使用回声抵消在单线对上实现双向通信。
以太网供电PoE技术于2003年推出,可通过标准的以太网线缆提供15.4W的供电功率。在一条电缆上同时支持供电与数据传输,对进一步减少车上电缆的重量和成本很有意义。由于常规的PoE是为4对电缆的以太网设计的,因此专门为车载以太网开发了PoDL,可在一对线缆上为电子控制单元ECU的正常运行提供12VDC或者5VDC供电电压。
当然,对带宽的需求也是一个因素,各种传感器,特别是激光雷达和高分辨率摄像头,必须用以太网传输数据。
为什么不能用传统以太网
为什么车载网络不能使用传统的以太网呢?
以太网是由鲍勃梅特卡夫(Bob Metcalfe)于1973年提出的,以太网络使用CSMA/CD(载波监听多路访问及冲突检测)技术,目前通常使用双绞线(UTP线缆)进行组网。包括标准的以太网(10Mbit/s)、快速以太网(100Mbit/s)、千兆网(1Gbit/s)和10G(10Gbit/s)以太网。它们都符合IEEE802.3 。
以太网中所有的传输都是串行传输,就是说在网卡的物理端口会在每一个单位时间内“写入”或是“读取”一个电位值(0或1)。那么这个单位时间对于1Gbps带宽来说就是1÷1000,000,000=1ns,每8个位(bit)相当于1个字节(Byte)。多个字节(Byte)可以组成一个数据帧。以太网传输数据是以帧为单位的。以太网规定每一个数据帧的最小字节是64byte,最大字节是1518byte。实际上每个数据帧之间还会有一个12字节的间隔。
由于带宽通常是由多个设备共享的,这也是以太网的优势所在。但是所有的发送端没有基于时间的流量控制,并且这些发送端永远是尽最大可能发送数据帧。这样来自不同设备的数据流就会在时间上产生重叠,即我们通常所说的冲突。因为所有数据流重叠/冲突的部分会遵循QoS优先机制进行转发,一部分的数据包肯定会被丢弃。在IT专业里有一个不成文的规定。当某个交换机的带宽占用率超过40%时就必须得扩容,其目的就是通过提高网络带宽来避免拥堵的产生。
由于以太网的发明时间太早,并没有考虑实时信息的传输问题。尽管RTP(Realtime Transport Protocol)能在一定程度上保证实时数据的传输,但并不能为按顺序传送数据包提供可靠的传送机制。因此,想要对所有的数据包进行排序,就离不开对数据的缓冲(Buffer)。但一旦采用缓冲的机制就又会带来新的问题—极大的“延时”。换句话说,当数据包在以太网中传输的时候从不考虑延时、排序和可靠交付。传统以太网最大的缺点是不确定性或者说非实时性,由于Ethernet采用CSMA/CD方式,网络负荷较大时,网络传输的不确定性不能满足工业控制的实时要求,故传统以太网技术难以满足控制系统要求准确定时通信的实时性要求,一直被视为“非确定性”的网络。尽管传统二层网络已经引入了优先级(Priority)机制,三层网络也已内置了服务质量(QoS)机制,仍然无法满足实时性数据的传输。此外,在传统以太网中,只有当现有的包都处理完后才会处理新到的包,即使是在Gbit/s的速率下也需要几百微秒的延迟,满足不了车内应用的需求。更何况目前是Mbit/s的速率,延迟最多可能达上百毫秒,这肯定是无法接受的。普通以太网采用的是事件触发传输模式,在该模式下端系统可以随时访问网络,对于端系统的服务也是先到先服务。事件触发模式的一个明显的缺点是当几个端系统需要在同一传输媒介上进行数据通讯时,所产生的传输时延和时间抖动会累积。
随着音视频娱乐大量进入汽车座舱,IEEE开始着手开发用于音视频传输的以太网,这就是EAVB。AVB——以太网音视频桥接技术(Ethernet Audio VideoBridging)是IEEE的802.1任务组于2005开始制定的一套基于新的以太网架构的用于实时音视频的传输协议集。
以太网默认的转发机制叫做“BestEffort”(尽力而为)。也就是说当数据包抵达端口后,本着先入先出的原则转发。当网络的流量稀疏,这本不是一个问题。但在实际环境中,大量的数据包极有可能在一瞬间抵达端口。当然,端口可以在一定程度上缓存并延时转发,但我们一方面是不能容忍过大的延时转发,另一方面交换机的物理端口缓存也非常小,不可能有效解决大量数据包瞬间抵达的问题。音视频流恰好是沿等长的时间间隔发布数据的。比如说:一个24比特48K采样的专业音频通道,每个采样的时间间隔是20.83 µs。如果我们按照每6个采样封装成一个数据包,那么每个数据包的固定间隔就是125 µs。每个数据包是由两个部分组成,数据报头(74字节)+音频通道采样数据(24字节X通道数)。如果用传统以太网传输,肯定会出现丢包,在网络本身架构没法改变的情况下,只能修改数据结构。将几个不同的音频流进行流量整形(Traffic shaping),流量整形而不是流量控制(TrafficControl),经过流量整形每个流所占的带宽会在同一个时间节点。所有的非实时流可以见缝插针提高对带宽的占用率。这就是EAVB的基本原理。
EAVB与传统以太网比有4个不同:
1. 必须采用基于MAC地址的传输方式即二层传输或是基于IP地址UDP的传输方式,从而减小数据包的开销以及降低传输延时。
2. 由于二层传输和UDP均不属于可靠交付,因此必须依靠QoS来“尽可能”保障可靠交付。
3. 所有数据包需要有“时间戳”(Time Stamp),数据抵达后根据数据包头的“时间戳”进行回放。因此各个网络终端设备必需进行“时钟同步”也就是通常所说的时钟校准。
4. 数据包被转发时需采用队列协议按序转发,从而尽可能做到低延时。
但是EAVB一直没推广开,原因在于汽车领域内传输音视频流最典型的应用是后座娱乐系统,这种系统完全不用考虑延迟,那就是哄小孩的。而其他应用大多是纯视频,EAVB需要硬件压缩然后再解压,这就大幅度增加成本。纯视频可以采用低成本传输方式,比如GMSL、MIPI或FPDLINK。所以EAVB一直没有什么应用,在2011年3月,美国SAE跨界推出AS 6802标准,这是一种飞机航天领域内以太网应用的标准,也可以在汽车上用。IEEE受到刺激,在2012年11月,将EAVB小组改名为TSN,就是时间敏感网络。
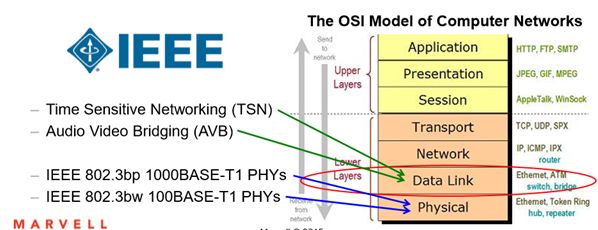
TSN主要定位数据链路层,在物理层方面,IEEE也做了新标准,这就是IEEE 802.3bp和IEEE 802.3bw,IEEE的目标不仅是车载领域,还包括了工业以太网。
TSN主要支持者包括思科、英特尔、瑞萨、德国工业机器人巨头KUKA、三星哈曼、宝马、通用汽车、现代汽车、博世、博通、德州仪器、NXP、三菱电机、LG、Marvell、模拟器件,通用电气。
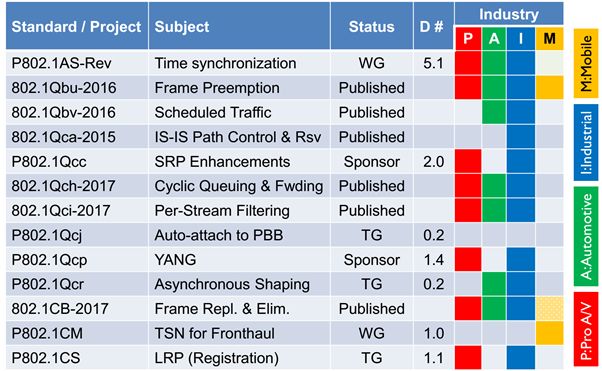
TSN是一系列标准,非常庞大,也非常灵活,可以按需求选择,不过对技术实力差的厂家来说就很痛苦,不知如何选择。
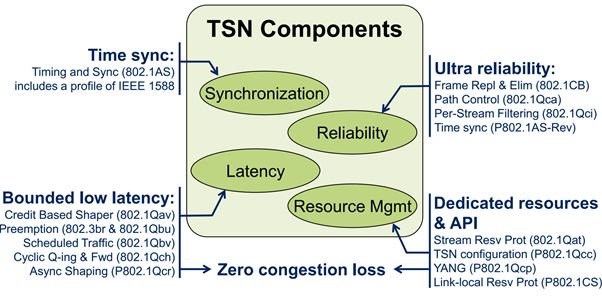
物理层标准已经在2015年中期确定,由于Marvell参与了IEEE 802.3bp和IEEE 802.3bw的标准制定,因此2015年就同步推出对应产品,包括用在特斯拉AP 2.0上的88E6321,88E6341。不过主要应用目标市场还是用在宽带网关、无线路由和工业以太网交换机领域。
2017年,TSN汽车应用领域大部分标准定型,博通在2017年12月推出BCM53162,主要目标市场就是无人车和L3级无人驾驶,还有无人机和机器人。
博通对未来汽车骨干网预测如上图。BCM53162支持TSN的802.1Qav 、8021.1Qbv、 802.1Qci,时钟方面支持IEEE 1588 V2、IEEE 802.1AS。
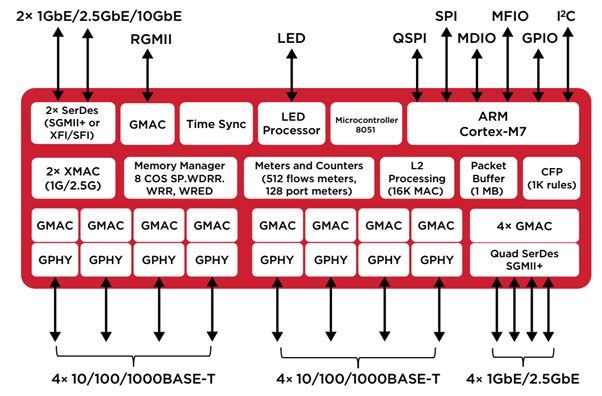
上图为BCM53162内部框架图。
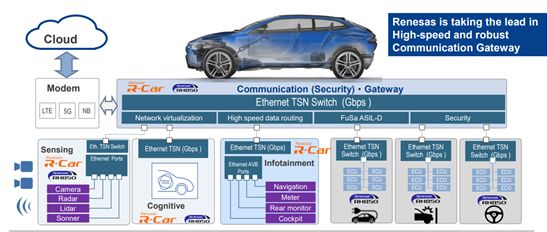
上图是瑞萨对未来汽车架构的设想,TSN是关键,IEEE原本预计要到2021年才有量产车用TSN,现在看来应该会提前1到2年。