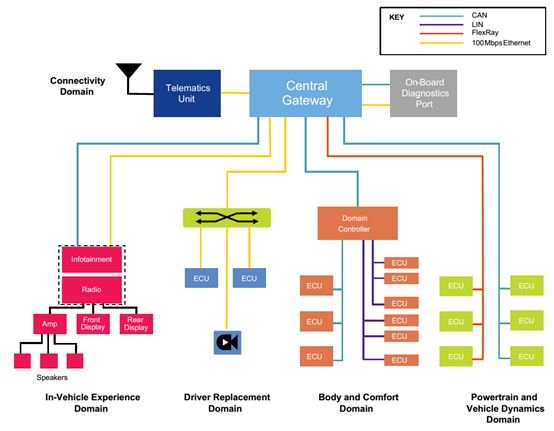
要想理解L4级无人驾驶系统的核心——TSN以太交换机,得先从中央网关说起。今天大多数高级车辆都具备中央网关,其最典型应用就是OTA,其次是远程通讯。
资料来源:NXP
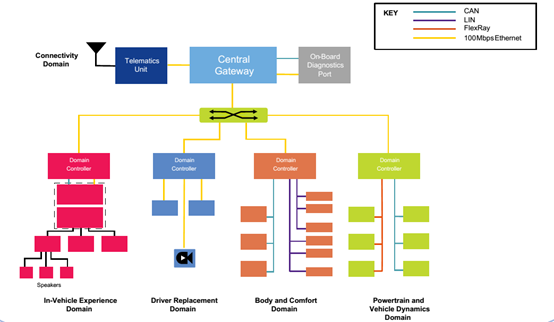
上图为现代车辆网关桥接与异构网络系统。Telematics Unit也就是TBox通过中央网关与车辆的网络系统连接。这些网络包括基于总线型的CAN、LIN、MOST、Flexray,还有基于IP或虚拟局域网(VLAN)的以太网。
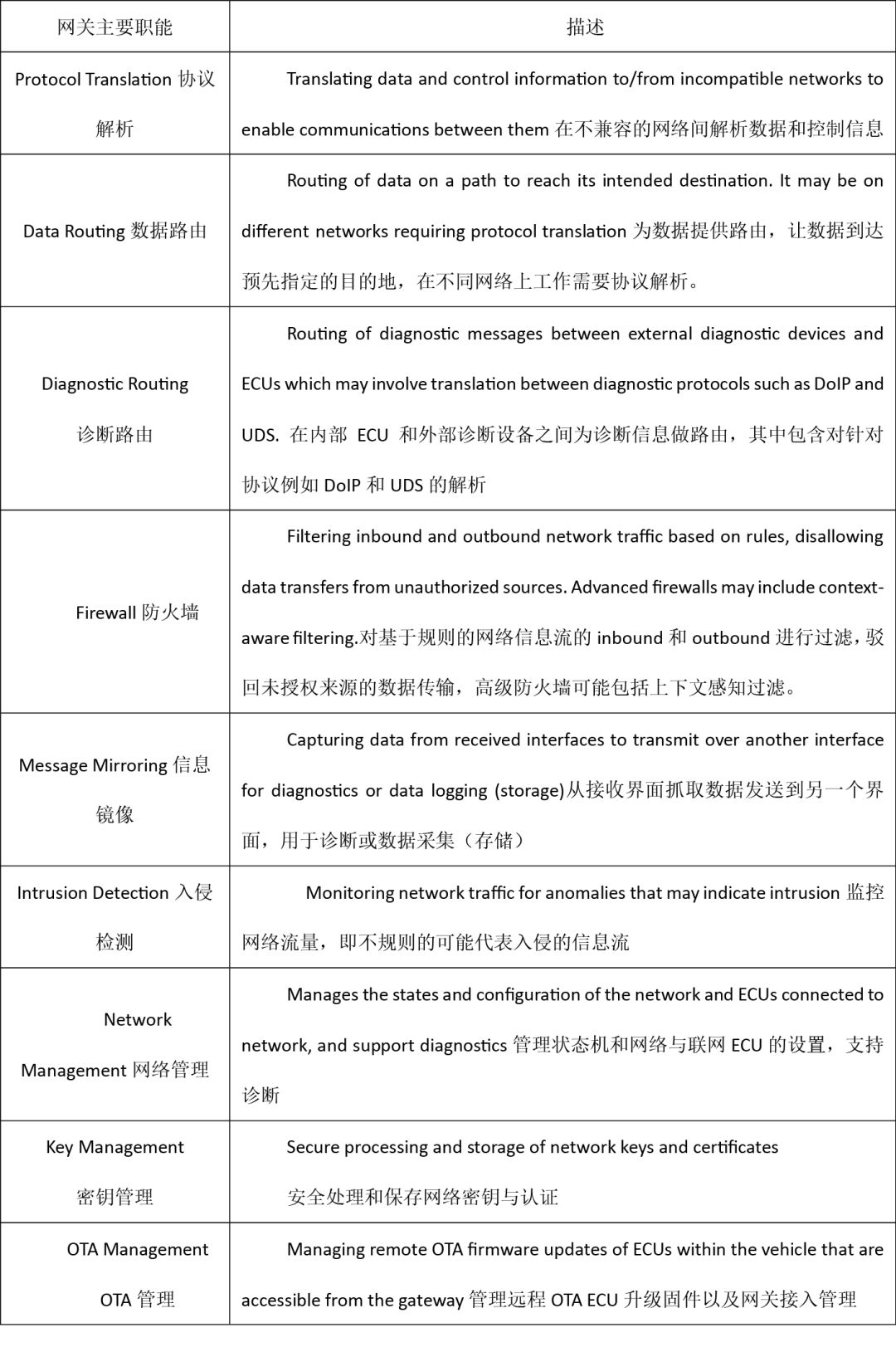
中央网关主要职能
资料来源:NXP
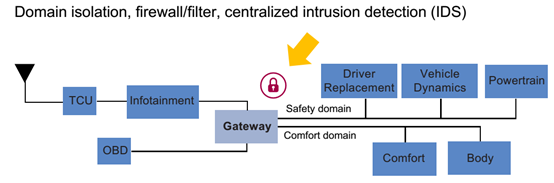
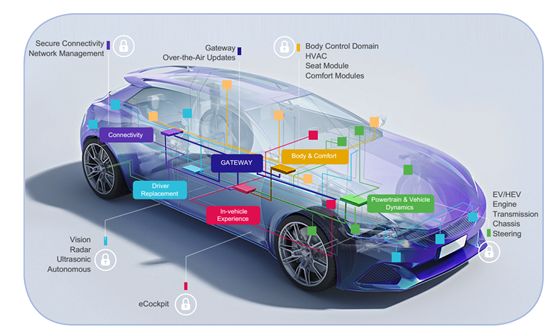
一般中央网关会将接入的域分为安全域和舒适域两大类,两者严格隔离,保证安全域不会受到未授权的数据进入。也就是说远程只能操作舒适域,所以远程遥控车辆底盘域的速度、转向、制动都是不可能的,遥控动力传递域如变速箱也是不可能的。
MPC5748G内部框架图
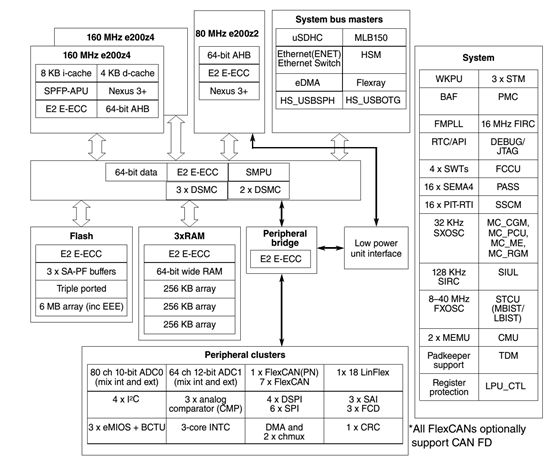
飞思卡尔(NXP)是中央网关芯片的领导者,在2008年量产第一代带以太网诊断的网关控制器MPC5667,并用在当年宝马5系和7系上。2013年量产第一片带EAVB网关的芯片MPC5604e,并用在宝马X5的360环视上。最新的是第四代MPC574x系列,以MPC5748G为最高级配置,拥有多达8个CAN接口。
MPC5748G配备HSM硬件安全模块,与传统的CSE相比,CSE只能完全按照SHE的规范来写,HSM用户可以自己写加密算法,硬件上CSE和HSE都有一个32位处理器,不过HSM有独立的Fllash/RAM。
未来汽车电子网关与交换
资料来源:NXP
汽车以太网骨干
资料来源:NXP
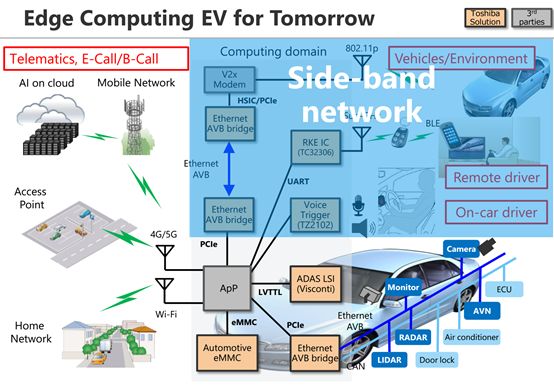
东芝4/5G时代车联网应用框架,以Ethernet AVB为骨干网。
未来的发展趋势是域控制和以太骨干网连接,通过交换机再连接至中央网关。为什么要用以太骨干网连接再加交换,以太网与传统的基于总线的网络比,最大的优势是成本低和带宽效率高。另一个是4G与5G的远程应用APP,还有V2X与大量宽带传感器的加入,无论是DSRC还是5G,都需要在ECU之间传输海量数据,有可能百兆以太网都不能胜任,多G比特以太网才比较合适。同时以太网可以将分布式网关功能集成进域控制器内,域控制器提供定位和控制处理,同时在传统网络界面内提供数据路由功能。
另外,L4级无人驾驶需要多套冗余系统(这是L3与L4的本质区别,L3在系统Fallback时需要人类驾驶员接手,而L4是由另一套冗余系统接手)或多套系统并联来提高运算能力,这就需要交换机和以太骨干网。
资料来源:博世
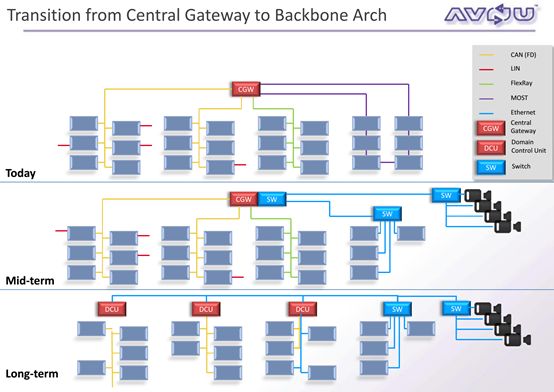
博世2012年的资料认为最终中央网关会消失,不过NXP应该不会同意这种观点,网络安全的整体把控还是需要一个中央网关。把中央网关的功能分解到路由或域控制器内还不如一个真实的中央网关效率更高,综合成本也更低。
AUTOSAR以太交换协议栈配置与控制
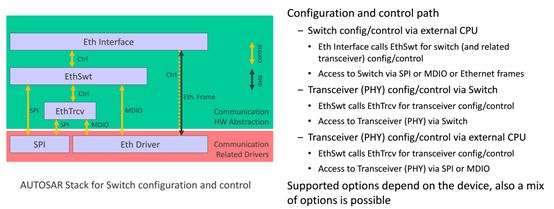
资料来源:Marvell
AUTOSAR也早为以太交换做了准备。
资料来源:博世2011
以太骨干网自然不会沿用传统的以太网协议,而是采用TSN网络协议,TSN脱胎自EAVB。
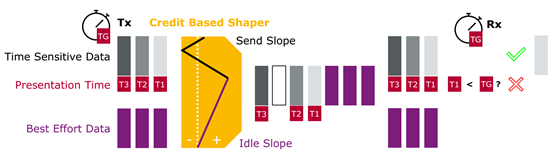
EAVB主要加入主时钟的概念。TSN进一步拓展为时钟同步Time Synchronization和流量整形与顺序管理Traffic Scheduling。
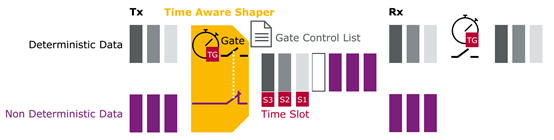
Traffic Scheduling又可近似于Follow-up。Traffic Scheduling和Time Synchronization是TSN最核心元素。
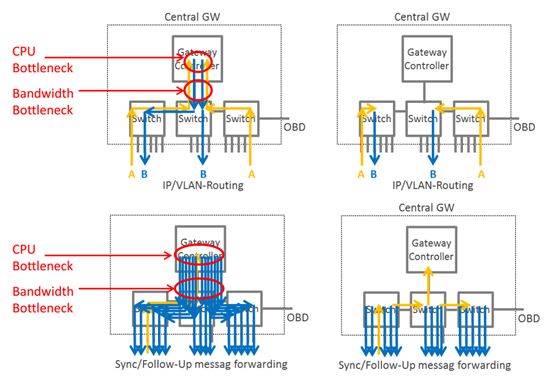
与传统的IP/VLAN路由相比,TSN有几大优势:
•没有CPU运算能力和带宽瓶颈限制
•和其他ECU没有交叉依赖
•有更快的并行启动
•交换和MCU有独立的Reboot
•高度的灵活性
以太交换机固件架构
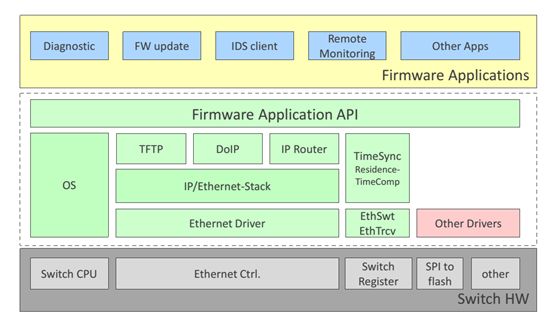
资料来源:Marvell
德国大陆汽车旗下子公司Elektrobit与Marvell联合打造了一款车载以太交换芯片,型号为88Q5050。
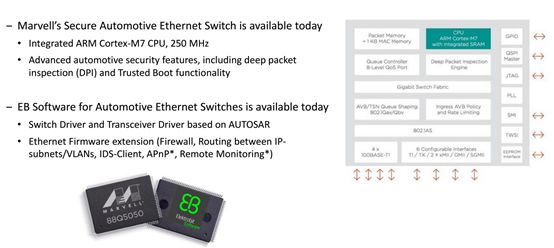
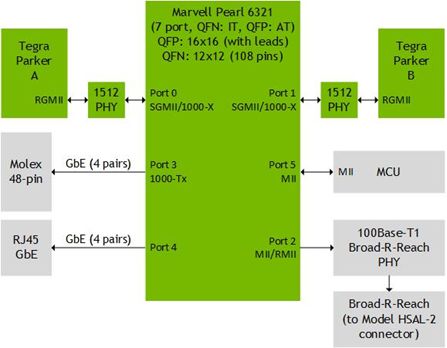
毫无疑问,大陆的运算平台会采用这款芯片。这款芯片上一代原型为88E6321,在英伟达的PX2做EAVB交换机,连接两个Parker。另一方面也连接主要传感器和底盘控制MCU(也就是英飞凌的TC297T),可谓是PX2的关键芯片。
88Q5050则用在英伟达最新旗舰Pegasus,这也是基于TSN的首次实际应用。
瑞萨的L4计算架构
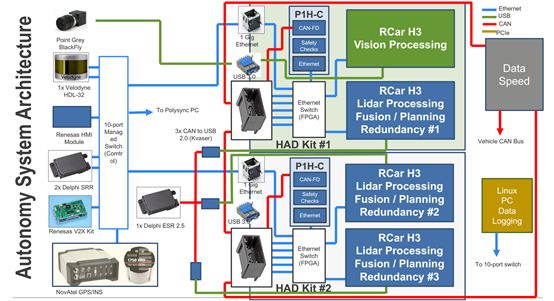
上图是瑞萨的L4计算架构,也是目前业内最接近量产,成本最低,功耗最低,安全性最高,冗余最充分的系统,采用4片R-CAR H3组成。瑞萨没有现成的TSN以太网交换芯片,只能暂时以FPGA代替,和PX2一样,这个交换FPGA将两片H3连在一起。同时又用一片交换芯片将这两套系统都连接在传感器之上。国内则有人将四片Parker并联在一起。
未来L4计算架构的核心将是TSN以太交换机。