Autonomous Driving Algorithm Research: BEV Drives Algorithm Revolution, AI Large Model Promotes Algorithm Iteration
The core of the autonomous driving algorithm technical framework is divided into three parts: environment perception, decision planning, and control execution.
Environment perception: convert sensor data into machine language of the scenario where the vehicle is located, which can include object detection, recognition and tracking, environment modeling, motion estimation, etc.;
Decision planning: Based on the output results of perception algorithm, the final behavioral action instructions are given, including behavioral decisions (vehicle following, stopping and overtaking), action decisions (car steering, speed, etc.), path planning, etc.;
Control actuation: according to the output results of decision-making level, the underlying modules are mobilized to issue instructions to the core control components such as accelerator and brake, and promote vehicle to drive according to the planned route.
BEV drives algorithm revolution
In recent years, BEV perception has received extensive attention. BEV model mainly provides a unified space to facilitate the fusion of various tasks and sensors. It has following advantages:
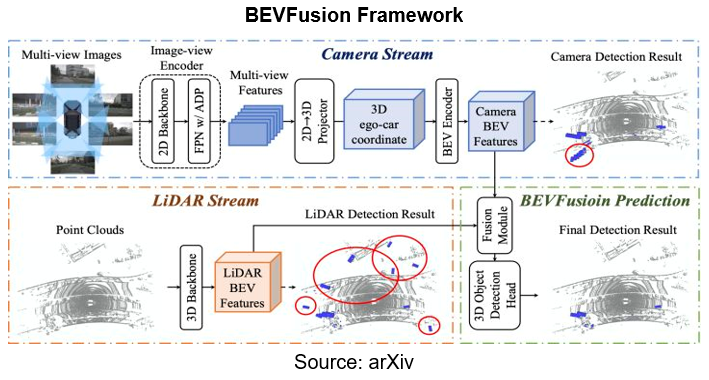
BEV unifies the multimodal data processing dimension and makes multimodal fusion easier
The BEV perception system converts the information obtained from multiple cameras or radars to a bird's-eye view, and then do tasks such as object detection and instance segmentation, which can more intuitively display the dimension and direction of objects in BEV space.
In 2022, Peking University & Ali proposed a fusion framework of LiDAR and vision - BEVFusion. The processing of radar point clouds and image processing are carried out independently, using neural networks to encode, project to a unified BEV space, and then merge the two in BEV space.
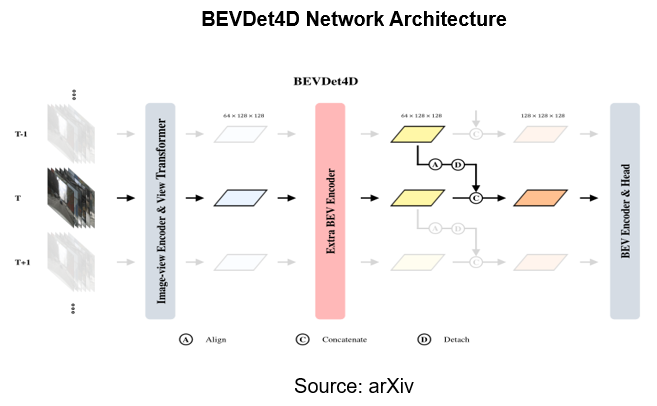
Realize timing information fusion and build 4D space
In the 4D space, the perception algorithm can better complete the perception tasks such as speed measurement, and can transmit the results of motion prediction to the decision and control module.
PhiGent Robotics proposed BEVDet4D in 2022, which is a version based on BEVDet to increase timing fusion. BEVDet4D extends BEVDet by retaining intermediate BEV features of past frames, and then fuses features by aligning and splicing with the current frame, so that time clues can be obtained by querying two candidate features.
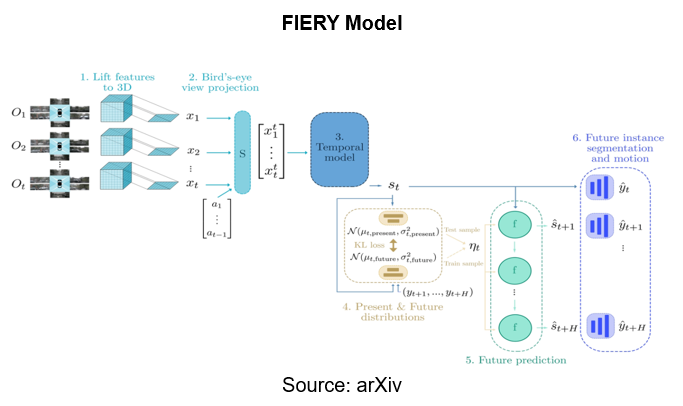
Imagine occluded objects to realize object prediction
In the BEV space, the algorithm can predict the occluded area based on prior knowledge, and imagine whether there are objects in the occluded area.
FIERY, proposed by Wayve in cooperation with the University of Cambridge in 2021, is an end-to-end road dynamic object instance prediction algorithm that does not rely on high-precision maps and is only based on aerial views of monocular cameras.
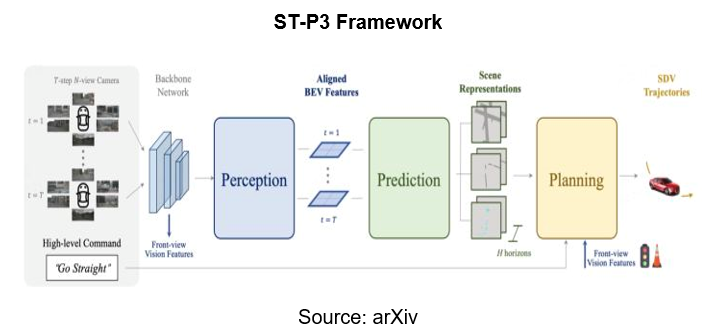
Promoting development of an end-to-end autonomous driving framework
In the BEV space, perception and prediction can be directly optimized end-to-end through neural networks in a unified space, and the results can be obtained at the same time. Not only the perception module, but also the BEV-based planning decision-making module is also the direction of academic research.
In 2022, autonomous driving team of Shanghai Artificial Intelligence Laboratory and the team of associate professor Yan Junchi of Shanghai Jiao Tong University collaborated on paper ST-P3 to propose a spatiotemporal feature learning solution that can simultaneously provide a set of more representative features for perception, prediction and planning tasks.
AI large model drives algorithm iteration
After 2012, deep learning algorithms are widely applied in autonomous driving field. In order to support larger and more complex AI computing needs, AI large models with the characteristics of "huge data, huge computing power, and huge algorithms" were born, which accelerated the iteration speed of algorithms.
Large Model and Intelligent Computing Center
In 2021, HAOMO.AI launched research and landing attempts on large-scale Transformer model, and then gradually applied it on a large scale in projects including multi-modal perception data fusion and cognitive model training. In December 2021, HAOMO.AI released autonomous driving data intelligence system MANA (Chinese name "Snow Lake"), which integrates perception, cognition, labeling, simulation, computing and other aspects. In January 2023, HAOMO.AI together with Volcano Engine unveiled MANA OASIS, a supercomputing center with a total computing power of 670 PFLOPS. After deploying HAOMO.AI's training platform, OASIS can run various applications including cloud large-scale model training, vehicle-side model training, annotation, and simulation. With the help of MANA OASIS, the five major models of HAOMO.AI have ushered in a new appearance and upgrade.
In August 2022, based on Alibaba Cloud intelligent computing platform, Xpeng Motors built an autonomous driving intelligent computing center "Fuyao", which is dedicated to training of autonomous driving models. In October 2022, Xpeng also announced the introduction of Transformer large model.
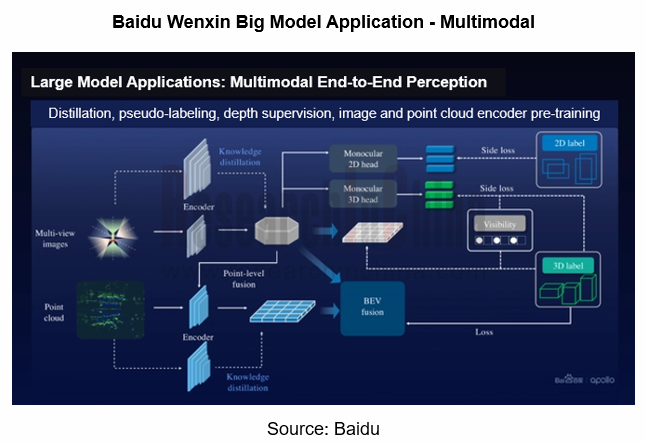
In November 2022, Baidu released Wenxin Big Model. Leveraging more than 1 billion parameters, it recognizes thousands of objects, helping to enlarge the scope of semantic recognition. At present, it is mainly used in three aspects: distance vision, multimodality and data mining.
China Passenger Car Electronic Control Suspension Industry Research Report, 2025
Electronic control suspension research: air springs evolve from single chamber to dual chambers, CDC evolves from single valve to dual valves
ResearchInChina released "China Passenger Car Elect...
Automotive XR Industry Report, 2025
Automotive XR industry research: automotive XR application is still in its infancy, and some OEMs have already made forward-looking layout
The Automotive XR Industry Report, 2025, re...
Intelligent Driving Simulation and World Model Research Report, 2025
1. The world model brings innovation to intelligent driving simulation
In the advancement towards L3 and higher-level autonomous driving, the development of end-to-end technology has raised higher re...
Autonomous Driving Map (HD/LD/SD MAP, Online Reconstruction, Real-time Generative Map) Industry Report 2025
Research on Autonomous Driving Maps: Evolve from Recording the Past to Previewing the Future with "Real-time Generative Maps"
"Mapless NOA" has become the mainstream solution for autonomous driving s...
End-to-End Autonomous Driving Research Report, 2025
End-to-End Autonomous Driving Research: E2E Evolution towards the VLA Paradigm via Synergy of Reinforcement Learning and World Models??The essence of end-to-end autonomous driving lies in mimicking dr...
Research Report on OEMs and Tier1s’ Intelligent Cockpit Platforms (Hardware & Software) and Supply Chain Construction Strategies, 2025
Research on intelligent cockpit platforms: in the first year of mass production of L3 AI cockpits, the supply chain accelerates deployment of new products
An intelligent cockpit platform primarily r...
Automotive EMS and ECU Industry Report, 2025
Research on automotive EMS: Analysis on the incremental logic of more than 40 types of automotive ECUs and EMS market segments
In this report, we divide automotive ECUs into five major categories (in...
Automotive Intelligent Cockpit SoC Research Report, 2025
Cockpit SoC research: The localization rate exceeds 10%, and AI-oriented cockpit SoC will become the mainstream in the next 2-3 years
In the Chinese automotive intelligent cockpit SoC market, althoug...
Auto Shanghai 2025 Summary Report
The post-show summary report of 2025 Shanghai Auto Show, which mainly includes three parts: the exhibition introduction, OEM, and suppliers. Among them, OEM includes the introduction of models a...
Automotive Operating System and AIOS Integration Research Report, 2025
Research on automotive AI operating system (AIOS): from AI application and AI-driven to AI-native
Automotive Operating System and AIOS Integration Research Report, 2025, released by ResearchInChina, ...
Software-Defined Vehicles in 2025: OEM Software Development and Supply Chain Deployment Strategy Research Report
SDV Research: OEM software development and supply chain deployment strategies from 48 dimensions
The overall framework of software-defined vehicles: (1) Application software layer: cockpit software, ...
Research Report on Automotive Memory Chip Industry and Its Impact on Foundation Models, 2025
Research on automotive memory chips: driven by foundation models, performance requirements and costs of automotive memory chips are greatly improved.
From 2D+CNN small models to BEV+Transformer found...
48V Low-voltage Power Distribution Network (PDN) Architecture and Supply Chain Panorama Research Report, 2025
For a long time, the 48V low-voltage PDN architecture has been dominated by 48V mild hybrids. The electrical topology of 48V mild hybrids is relatively outdated, and Chinese OEMs have not given it suf...
Research Report on Overseas Cockpit Configuration and Supply Chain of Key Models, 2025
Overseas Cockpit Research: Tariffs stir up the global automotive market, and intelligent cockpits promote automobile exports
ResearchInChina has released the Research Report on Overseas Cockpit Co...
Automotive Display, Center Console and Cluster Industry Report, 2025
In addition to cockpit interaction, automotive display is another important carrier of the intelligent cockpit. In recent years, the intelligence level of cockpits has continued to improve, and automo...
Vehicle Functional Safety and Safety Of The Intended Functionality (SOTIF) Research Report, 2025
Functional safety research: under the "equal rights for intelligent driving", safety of the intended functionality (SOTIF) design is crucial
As Chinese new energy vehicle manufacturers propose "Equal...
Chinese OEMs’ AI-Defined Vehicle Strategy Research Report, 2025
AI-Defined Vehicle Report: How AI Reshapes Vehicle Intelligence?
Chinese OEMs’ AI-Defined Vehicle Strategy Research Report, 2025, released by ResearchInChina, studies, analyzes, and summarizes the c...
Automotive Digital Key (UWB, NearLink, and BLE 6.0) Industry Trend Report, 2025
Digital key research: which will dominate digital keys, growing UWB, emerging NearLink or promising Bluetooth 6.0?ResearchInChina has analyzed and predicted the digital key market, communication techn...